






全部分类
浏览量:
1000
产品描述
安全性作为汽车行驶中须严格保证的要求,在汽车研发设计过程中,功能安全等相关安全设计标准及体系贯穿始终,而对于智能驾驶而言,其系统的安全稳定性,高度或依赖于其软硬件系统的安全性能,且面临来自环境、道路、信息、通信等各层面的非安全因素的挑战,故在其研发设计过程中必须要考虑系统安全方面的设计。结合自身汽车电子产品研发实践,经纬恒润在智驾域提供覆盖安全流程、产品开发认证及工具平台的综合凯发k8国际首页登录的解决方案。
iso26262 功能安全旨在避免由e/e系统功能失效导致的不可接受的风险,主要是针对系统性失效/随机硬件失效导致的风险的进行分析和控制,然而传感器和感知算法(e.g. machine learning, neural networks),在没有出现电子电气系统失效时,由于设计的局限性也会导致风险,但此部分并不属于iso 26262的范畴。为了弥补iso 26262的局限,预期功能安全(safety of the intended functionality,sotif)应运而生。
sotif定义为不存在不可接受的由功能设计不足或者可预见的驾驶员误操作风险,主要为了消除以下两类风险:
- performance limitation 例如:恶劣环境条件下,传感器无法探测到物体
- misuse 例如:人机界面设计差,导致驾驶员误用自动驾驶功能
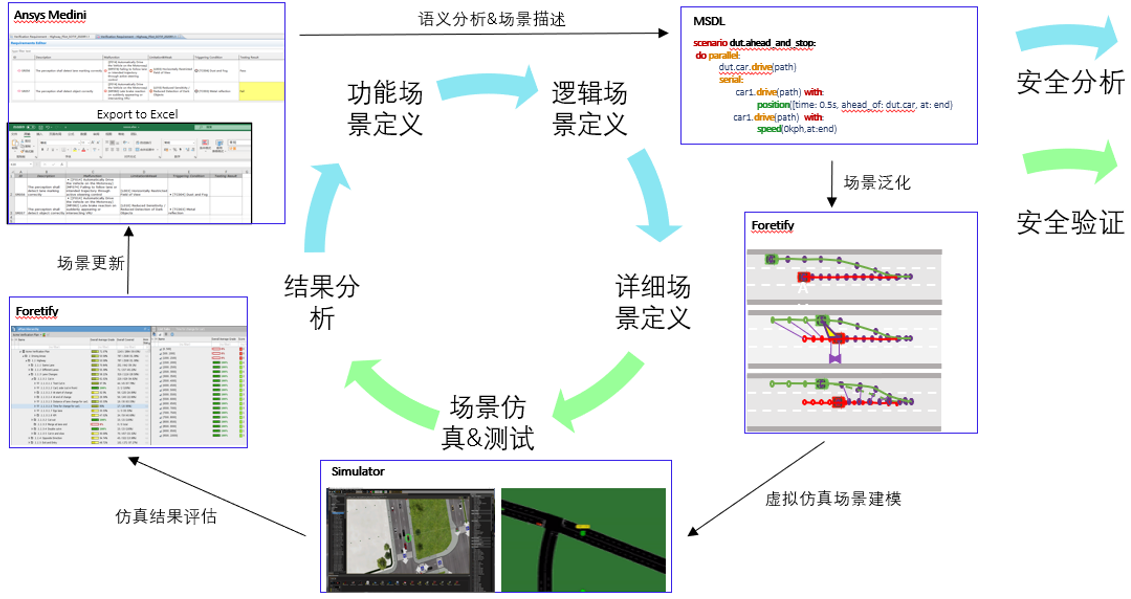
结合功能安全及预期功能安全的要求,并基于智驾系统开发及测试的实际需求,可将系统定义——指标构建——指标验证——定义迭代形成有效闭环。具体而言:
- 在场景定义阶段,结合系统定义、功能安全&预期功能安全的定义,进行逻辑场景的描述和指标定义及预设
- 借助m-sdl语言,将上一阶段定义的场景进行代码化,同时根据指标及约束条件的预设范围进行场景的泛化
- 结合场景建模仿真引擎可自动构建上一阶段代码化的场景,并在仿真环境中,结合车辆运动及控制模型进行场景指标的验证,验证后的场景指标结果可对场景定义阶段中预设的场景指标进行反馈校验,从而实现上述的系统定义——指标构建——指标验证——定义迭代的有效闭环。
关键词:
智驾功能安全
预期功能安全开发及验证平台
扫二维码用手机看
上一个
智驾数采与测评
下一个
智驾场景生成及覆盖率分析
